

Projet Multiwiicopter QUAD X
5 participants
Page 1 sur 2
Page 1 sur 2 • 1, 2 ![]()
![]()
 Projet Multiwiicopter QUAD X
Projet Multiwiicopter QUAD X
![]() Julien Mer 21 Déc - 18:07
Julien Mer 21 Déc - 18:07
Bonjour à tous,
Présentation ultrarapide :
J'ai 30 ans, 2 enfants, 1 femme, 1 chien ! Je suis conducteur de travaux dans le bâtiment.
J'aime : La moto Enduro, la chasse sous marine, le modelisme, et les outils.
Je me suis découvert un intéret pour le modélisme depuis quelques mois, après une journée meeting dans un club du coin ou j'habite.
Je me suis donc lancé dans la construction de mon premier modèle tout seul : un quadcopter en X.
J'ai l'occasion de me pencher dessus car suite a une chute de moto, j'ai 1 mois a tuer chez moi... (c'est le tarif pour une clavicule et 2 côtes)
Malheureusement mes espoirs partent en fumée, après avoir bien avancé, je butte sur un truc !
Je dois bien me rendre à l'évidence, mon manque d'expérience a fini par me rattraper ...
J'ai bricolé un chassi, posé et branché 4 moteurs, 4 ESC, batterie, carte Paris V4/ WMP+Nunchuck, et rien !
Pourtant dans le logiciel multiwii_conf 1_9, les capteurs ont l'air de fonctionner impécablement.
autre info : J'ai une radio graupner MX12 Hott.
Je souhaiterais donc pouvoir bénéficier du savoir dont certains d'entre vous sont porteurs, et qu'il souhaiteraient partager avec moi.
Ce projet me tien vraiment à coeur, non seulement, parce que je souhaite faire de la photo aérienne, mais aussi
parce que je souhaite comprendre le cheminement complet de l'élaboration de mon appareil.
Je me tiens a votre disposition pour toute information ou toute question.
En vous remerciant par avance de votre bonté.
A très bientôt,
K3FF
Présentation ultrarapide :
J'ai 30 ans, 2 enfants, 1 femme, 1 chien ! Je suis conducteur de travaux dans le bâtiment.
J'aime : La moto Enduro, la chasse sous marine, le modelisme, et les outils.
Je me suis découvert un intéret pour le modélisme depuis quelques mois, après une journée meeting dans un club du coin ou j'habite.
Je me suis donc lancé dans la construction de mon premier modèle tout seul : un quadcopter en X.
J'ai l'occasion de me pencher dessus car suite a une chute de moto, j'ai 1 mois a tuer chez moi... (c'est le tarif pour une clavicule et 2 côtes)
Malheureusement mes espoirs partent en fumée, après avoir bien avancé, je butte sur un truc !
Je dois bien me rendre à l'évidence, mon manque d'expérience a fini par me rattraper ...
J'ai bricolé un chassi, posé et branché 4 moteurs, 4 ESC, batterie, carte Paris V4/ WMP+Nunchuck, et rien !
Pourtant dans le logiciel multiwii_conf 1_9, les capteurs ont l'air de fonctionner impécablement.
autre info : J'ai une radio graupner MX12 Hott.
Je souhaiterais donc pouvoir bénéficier du savoir dont certains d'entre vous sont porteurs, et qu'il souhaiteraient partager avec moi.
Ce projet me tien vraiment à coeur, non seulement, parce que je souhaite faire de la photo aérienne, mais aussi
parce que je souhaite comprendre le cheminement complet de l'élaboration de mon appareil.
Je me tiens a votre disposition pour toute information ou toute question.
En vous remerciant par avance de votre bonté.
A très bientôt,
K3FF
Julien- Messages : 18
Date d'inscription : 21/12/2011
Age : 42
![]()
![]()
Re: Projet Multiwiicopter QUAD X
![]() rik27 Jeu 22 Déc - 13:38
rik27 Jeu 22 Déc - 13:38
salut
Pour la radio, cela est assez simple, un simple programme avion suffit. (un programme helico H1 fonctionne aussi)
Pour les réglages:
-GAZ: ATV +120/-120
-AILE/ELEV: ATV +130/-130
-A/V: ATV +MAX / -MAX
-Voie auxiliaire : +120/-120 et programmez la bascule sur un inter 2 ou 3 psoitions
Reglez la voie auxiliaire de manière à ce que le quad demarre en mode normal (desactivation du nunchunk)
Regardez dans le soft, il faut cliquez sur les petits carré pour activer/désactiver les mode suivant la position de l'inter...
les valeurs des atv ne jouent pas sur la vitesse de rotation des axes comme sur un quad standard. Ceci joue sur la résolution de l'arduino.Avoir +130/-130 permet une meilleurs analyse de la course des manches et ainsi rendre les mouvements fluides et précis. Au contraire en baissant ces valeurs, cela rend le quad instable et moins précis...
A: initalisation des gyros sur le terrain
Avant de commencer il faut calibrer les gyroscopes.
Pour ce faire:
-Allumez la radio.
-Branchez le quad et essayant de le laisser le plus à plat possible
-Attendez l'initalisation des gyros (lumiere verte de l'arduino qui clignote puis s'arrette)
-tous les trim à 0
-Gaz à 0
-Manche anticouple à fond à GAUCHE + Manche de piqué à fond en bas
-La lumiere verte clignote et indique la calibration.Une fois qu'elle à fini de clignoter les gyros sont calibrés.
B: les valeurs PID, et reglage initiaux
Branchez le quad sur le pc avec la carte FTDI
pour l'instant mettez comme valeurs celles-ci:
ROLL : P=2 I=0.40 D=5 RATE=0.0
PITCH : P=2 I=0.40 D=5
YAW : P=8 I=0.00 D=20 RATE=0.0
RC RATE:0.90
RC EXPO: 0.65
Throttle PID attenuation:0.0
le calibrage peut ce faire aussi via la GUI 1.9
donc ; configuration de l'interface de develloppement Arduino
Lancez l'application arduino.
Cliquez sur "tools"
Cliquez ensuite sur "board"
Choisissiez la carte que vous possedez (normalement c'est la carte "Arduino Pro Mini 5,5V 16mhz", mais adapter à votre materiel aux besoins)
puis aller dans "tools" et "Serial port". notez quelque par la liste des port COM...
* Normalement les cartes Arduino possèdent dans leurs "bootstrap" le driver, en autres terme, lorsque l'on branche le cable usb,le pilote s'installe tout seul.
Si ce n'est pas le cas, dans le dossier "Arduino" decompressé plus haut, il y a un répertoire drivers...
Il suffira de l'installer une fois pour que la carte Arduino soit reconnue ensuite.
Si vous utilisez une carte du type FTDI, branchez la carte sur l'Arduino avant de brancher l'USB.
* Retournez ensuite sur le logiciel Arduino
Verifiez dans "tools et "serial port" qu'un nouveau port apparait,...
Ouverture du logiciel:
Ouvrez le soft
Allez dans "files" puis "examples"
Cherchez MultiWiiV1_9 et cliquez dessus.
Normalement vous avez le code source de MultiWii qui apparait
Paramétrage du logiciel:
Le texte présenté dans le logiciel Arduino constitue les insctuctions qui vont faire fonctionner votre tri ou quadri rotor.
Ne touchez à rien d'autre que les paramettres.(config.h ) qui vont suivre, le programme risquerais de ne plus fonctionner
*
A): reglage du type de controleur brushless
il vous suffit de supprimer les "//" devant le controleur brushless que vous compter utiliser
*
B) Type de multicopter:
Sur la même methode, enlevez les "//" devant votre choix, et placez "//" devant "define TRI" si celui-ci n'est pas vôtre choix
Par exemple pour un QUADX cela donne:#define quad X.
parcourir ma config pour voir ce que ca donne a peut pret !
apres cela varie suivant le materiel monté ,baro ,acc,mag ect...
Compilation du programme
Une fois que vous avez tout parametrer, il vous suffit de cliquez sur "Play"
Cela va verifier le codage et le préparer à l'injection dans la puce.
si tout se passe bien vous obtiendrez le message comme quoi la compilation est correcte
En cas d'erreur verifiez la configuration, ou repartez d'un fichier "neuf" original.
Injection du code dans la puce:
Voila le programme est paramettré et compilé, il ne reste plus qu'a l'injecter dans la puce.
Pour cela cliquez sur "upload" et laisser le programme travailler.
Une fois le programme injecté vous aurrez en bas du logiciel arduino un message de réussite.
Verifications et tests
Voila, la puce est programmée, il ne reste plus qu'a tester votre montage et parametterer les elements pour le vol...
Quittez Arduino
Allez dans le répertoire MultiWiiConf1_5 que l'on a obtenu lors de la decompression au début de l'article...
Allez ensuite dans "windows.application"
Cliquez sur MultiWiiConf1_9.exe
Attendez quelques secondes, et vous obtenez l'interface graphique de réglage...
Choisissez le port com correspondant à votre arduino, en general c'est le dernier de la liste, chez moi c'est le port COM7, pour la plupart d'entre vous ça serra le COM5...
Si c'est le bon, les indicateur de gauche passent au vert...
Cliquez ensuite sur Start, puis sur Read...
Si vous avez bien configurer et cablé votre montage, en bougeant le module, vous devriez voir les accéléromètres et gyro réagir...
le calibrage du nunchuk ce fait en cliquant calib acc, les valeurs a gauche des courbes doivent passer a 0
pour changer les valeur PID il suffit de laissé cliqué sur la valeur et de deplacé a gauche pour descendre ou a droite pour monté la valeur..
bon voila deja deux trois truc apres on passera aux reglage du mode stable...a faire sur le terrain

Pour la radio, cela est assez simple, un simple programme avion suffit. (un programme helico H1 fonctionne aussi)
Pour les réglages:
-GAZ: ATV +120/-120
-AILE/ELEV: ATV +130/-130
-A/V: ATV +MAX / -MAX
-Voie auxiliaire : +120/-120 et programmez la bascule sur un inter 2 ou 3 psoitions
Reglez la voie auxiliaire de manière à ce que le quad demarre en mode normal (desactivation du nunchunk)
Regardez dans le soft, il faut cliquez sur les petits carré pour activer/désactiver les mode suivant la position de l'inter...
les valeurs des atv ne jouent pas sur la vitesse de rotation des axes comme sur un quad standard. Ceci joue sur la résolution de l'arduino.Avoir +130/-130 permet une meilleurs analyse de la course des manches et ainsi rendre les mouvements fluides et précis. Au contraire en baissant ces valeurs, cela rend le quad instable et moins précis...
A: initalisation des gyros sur le terrain
Avant de commencer il faut calibrer les gyroscopes.
Pour ce faire:
-Allumez la radio.
-Branchez le quad et essayant de le laisser le plus à plat possible
-Attendez l'initalisation des gyros (lumiere verte de l'arduino qui clignote puis s'arrette)
-tous les trim à 0
-Gaz à 0
-Manche anticouple à fond à GAUCHE + Manche de piqué à fond en bas
-La lumiere verte clignote et indique la calibration.Une fois qu'elle à fini de clignoter les gyros sont calibrés.
B: les valeurs PID, et reglage initiaux
Branchez le quad sur le pc avec la carte FTDI
pour l'instant mettez comme valeurs celles-ci:
ROLL : P=2 I=0.40 D=5 RATE=0.0
PITCH : P=2 I=0.40 D=5
YAW : P=8 I=0.00 D=20 RATE=0.0
RC RATE:0.90
RC EXPO: 0.65
Throttle PID attenuation:0.0
le calibrage peut ce faire aussi via la GUI 1.9
donc ; configuration de l'interface de develloppement Arduino
Lancez l'application arduino.
Cliquez sur "tools"
Cliquez ensuite sur "board"
Choisissiez la carte que vous possedez (normalement c'est la carte "Arduino Pro Mini 5,5V 16mhz", mais adapter à votre materiel aux besoins)
puis aller dans "tools" et "Serial port". notez quelque par la liste des port COM...
* Normalement les cartes Arduino possèdent dans leurs "bootstrap" le driver, en autres terme, lorsque l'on branche le cable usb,le pilote s'installe tout seul.
Si ce n'est pas le cas, dans le dossier "Arduino" decompressé plus haut, il y a un répertoire drivers...
Il suffira de l'installer une fois pour que la carte Arduino soit reconnue ensuite.
Si vous utilisez une carte du type FTDI, branchez la carte sur l'Arduino avant de brancher l'USB.
* Retournez ensuite sur le logiciel Arduino
Verifiez dans "tools et "serial port" qu'un nouveau port apparait,...
Ouverture du logiciel:
Ouvrez le soft
Allez dans "files" puis "examples"
Cherchez MultiWiiV1_9 et cliquez dessus.
Normalement vous avez le code source de MultiWii qui apparait
Paramétrage du logiciel:
Le texte présenté dans le logiciel Arduino constitue les insctuctions qui vont faire fonctionner votre tri ou quadri rotor.
Ne touchez à rien d'autre que les paramettres.(config.h ) qui vont suivre, le programme risquerais de ne plus fonctionner
*
A): reglage du type de controleur brushless
il vous suffit de supprimer les "//" devant le controleur brushless que vous compter utiliser
*
B) Type de multicopter:
Sur la même methode, enlevez les "//" devant votre choix, et placez "//" devant "define TRI" si celui-ci n'est pas vôtre choix
Par exemple pour un QUADX cela donne:#define quad X.
parcourir ma config pour voir ce que ca donne a peut pret !
apres cela varie suivant le materiel monté ,baro ,acc,mag ect...
Compilation du programme
Une fois que vous avez tout parametrer, il vous suffit de cliquez sur "Play"
Cela va verifier le codage et le préparer à l'injection dans la puce.
si tout se passe bien vous obtiendrez le message comme quoi la compilation est correcte
En cas d'erreur verifiez la configuration, ou repartez d'un fichier "neuf" original.
Injection du code dans la puce:
Voila le programme est paramettré et compilé, il ne reste plus qu'a l'injecter dans la puce.
Pour cela cliquez sur "upload" et laisser le programme travailler.
Une fois le programme injecté vous aurrez en bas du logiciel arduino un message de réussite.
Verifications et tests
Voila, la puce est programmée, il ne reste plus qu'a tester votre montage et parametterer les elements pour le vol...
Quittez Arduino
Allez dans le répertoire MultiWiiConf1_5 que l'on a obtenu lors de la decompression au début de l'article...
Allez ensuite dans "windows.application"
Cliquez sur MultiWiiConf1_9.exe
Attendez quelques secondes, et vous obtenez l'interface graphique de réglage...
Choisissez le port com correspondant à votre arduino, en general c'est le dernier de la liste, chez moi c'est le port COM7, pour la plupart d'entre vous ça serra le COM5...
Si c'est le bon, les indicateur de gauche passent au vert...
Cliquez ensuite sur Start, puis sur Read...
Si vous avez bien configurer et cablé votre montage, en bougeant le module, vous devriez voir les accéléromètres et gyro réagir...
le calibrage du nunchuk ce fait en cliquant calib acc, les valeurs a gauche des courbes doivent passer a 0
pour changer les valeur PID il suffit de laissé cliqué sur la valeur et de deplacé a gauche pour descendre ou a droite pour monté la valeur..
bon voila deja deux trois truc apres on passera aux reglage du mode stable...a faire sur le terrain

rik27- Messages : 778
Date d'inscription : 02/05/2011
![]()
![]()
Re: Projet Multiwiicopter QUAD X
![]() Julien Jeu 22 Déc - 16:02
Julien Jeu 22 Déc - 16:02
Je suis très impressionné par la qualité de cette réponse et tiens clairement a vous tirer mon chapeau.
Je vais tenter de vous faire un état des lieux aussi clair que possible, afin de vous présenter les travaux et étapes que j'ai réalisé jusqu'à ce jour.
Matériel :
Chassi :
- Création du chassi avec des barres en alu carré 12x12mm de chez Mr bricolage
- Découpe au dremel d'une frame provisoire dans une plaque de carbone (ebay)
Electronique :
- Wii motion + original
- Nunchuck original
- carte mère Paris V4
- Arduino pro mini 5V/16mhz -- ATmega 328
- Sbec Turnigy 8-26V -- Comme celui là
J'ai monté le tout en suivant les instructions a la lettre (sur de site comme multiwiicopter.com et multiwii.com), et j'ai vérifié et re-vérifié peut être 10 fois que tout était bien connecté comme il le faut (je m'approche du toc).
J'ai ensuite installé le soft arduino, les driver FTDI, injecté le code multiwii1_9 en QUADX, vérifié dans le programme Multiwiiconf_1_9 que tout fonctionnais, les gyros ont l'air de fonctionner correctement, inscrivant des courbes décadentes lors de mes mouvements acharnés.... Ouf, soulagé !
Propulsion :
- 4 moteurs Brushless Keda A20-26M -- 1130kv -- http://www.kedamodel.com/product/a20m.html
- 4 controleurs turnigy plush 18-22A --- (comme cela)
- Accu li-po 2200maH - 30-40 discharge
Côté radio : une Graupner MX12 E hott (6 voies) avec recepteur GR12 de la même marque (Graupner)
Suite de ma construction :
- j'ai raccordé les moteurs aux ESC
- Raccordé les esc + l' Sbec (5V) à la batterie
- raccordé la fiche 5V du Bec au recepteur GR12 Graupner
- Raccordé les voies du recepteur aux broches de la carte mère
en fonction de leurs attributions.
Et c'est ici que ma route s'arrete, c'est très très frustrant car je pense que j'ai entre les main un ensemble capable
de voler, mais je suis contraint et forcé de le regarder et d'admettre que mes connaissances ne me permettent pas d'aller au delà de ces étapes sans un guide.
Des jours et des jours de recherche sur des sites, forum, ect -- dans toutes les langues, ... mais rien ne fait. J'ai même le sentiment de m'enfoncer un peu plus en lisant des choses n'ayant pas un rapport flagrant, tout ce mélange.
Je n'ai jamais programmé une radio de ma vie, il semble que des réglages soit a faire..., j'entend parlé ci et là de PPM ?, de réglages des ESC (timming je suppose), d'augmenter le gain des gaz de X%, de calibrer les gyro, le nunchuck, .....
J'ai le tournis ! J'ai le sentiment d'avoir raté l' étape de l'apprentissage du vocabulaire technique qui semble si simple pour tous ces gens merveilleux qui semblent parler une autre langue...
Voilà ou j'en suis.
Je souhaite clairement que vous puissiez m'aider a faire voler l'engin, mais je souhaite surtout "comprendre" le pourquoi du comment afin de me coucher bien plus brillant chaque soirs !
Malheureusement je me dois de vous prendre un peu de votre temps...
QUELQUES PHOTOS :




Je vais tenter de vous faire un état des lieux aussi clair que possible, afin de vous présenter les travaux et étapes que j'ai réalisé jusqu'à ce jour.
Matériel :
Chassi :
- Création du chassi avec des barres en alu carré 12x12mm de chez Mr bricolage
- Découpe au dremel d'une frame provisoire dans une plaque de carbone (ebay)
Electronique :
- Wii motion + original
- Nunchuck original
- carte mère Paris V4
- Arduino pro mini 5V/16mhz -- ATmega 328
- Sbec Turnigy 8-26V -- Comme celui là
J'ai monté le tout en suivant les instructions a la lettre (sur de site comme multiwiicopter.com et multiwii.com), et j'ai vérifié et re-vérifié peut être 10 fois que tout était bien connecté comme il le faut (je m'approche du toc).
J'ai ensuite installé le soft arduino, les driver FTDI, injecté le code multiwii1_9 en QUADX, vérifié dans le programme Multiwiiconf_1_9 que tout fonctionnais, les gyros ont l'air de fonctionner correctement, inscrivant des courbes décadentes lors de mes mouvements acharnés.... Ouf, soulagé !
Propulsion :
- 4 moteurs Brushless Keda A20-26M -- 1130kv -- http://www.kedamodel.com/product/a20m.html
- 4 controleurs turnigy plush 18-22A --- (comme cela)
- Accu li-po 2200maH - 30-40 discharge
Côté radio : une Graupner MX12 E hott (6 voies) avec recepteur GR12 de la même marque (Graupner)
Suite de ma construction :
- j'ai raccordé les moteurs aux ESC
- Raccordé les esc + l' Sbec (5V) à la batterie
- raccordé la fiche 5V du Bec au recepteur GR12 Graupner
- Raccordé les voies du recepteur aux broches de la carte mère
en fonction de leurs attributions.
Et c'est ici que ma route s'arrete, c'est très très frustrant car je pense que j'ai entre les main un ensemble capable
de voler, mais je suis contraint et forcé de le regarder et d'admettre que mes connaissances ne me permettent pas d'aller au delà de ces étapes sans un guide.
Des jours et des jours de recherche sur des sites, forum, ect -- dans toutes les langues, ... mais rien ne fait. J'ai même le sentiment de m'enfoncer un peu plus en lisant des choses n'ayant pas un rapport flagrant, tout ce mélange.
Je n'ai jamais programmé une radio de ma vie, il semble que des réglages soit a faire..., j'entend parlé ci et là de PPM ?, de réglages des ESC (timming je suppose), d'augmenter le gain des gaz de X%, de calibrer les gyro, le nunchuck, .....
J'ai le tournis ! J'ai le sentiment d'avoir raté l' étape de l'apprentissage du vocabulaire technique qui semble si simple pour tous ces gens merveilleux qui semblent parler une autre langue...
Voilà ou j'en suis.
Je souhaite clairement que vous puissiez m'aider a faire voler l'engin, mais je souhaite surtout "comprendre" le pourquoi du comment afin de me coucher bien plus brillant chaque soirs !
Malheureusement je me dois de vous prendre un peu de votre temps...
QUELQUES PHOTOS :




Dernière édition par K3FF le Ven 23 Déc - 12:15, édité 1 fois
Julien- Messages : 18
Date d'inscription : 21/12/2011
Age : 42
![]()
![]()
Vidéo
![]() Julien Ven 23 Déc - 9:30
Julien Ven 23 Déc - 9:30
ça parle mieux que moi !
J'ai fait cela hier afin de vous monter que les éléments sembles se comporter correctement.
multiwiiconf par Maurice_chouchou
J'ai fait cela hier afin de vous monter que les éléments sembles se comporter correctement.
multiwiiconf par Maurice_chouchou
Julien- Messages : 18
Date d'inscription : 21/12/2011
Age : 42
![]()
![]()
Re: Projet Multiwiicopter QUAD X
![]() rik27 Ven 23 Déc - 14:15
rik27 Ven 23 Déc - 14:15
salut
bon alors , avant toute chose ,il faut vérifier toute les voies emeteur et recepteur .
es possible de me mettre une copie de ta config. (arduino) histoire de voir ce qui cloche.le probleme doit venir de la config. des voies et leur affectation dans le sketsh. enfin c est une hypotese..
ce qui me fait dire ca , c est que sur ta video ,les jauges des voix n ont pas de valeurs normal, par exemple throttle ne doit pas etre a 1500 mais pas loin des 1000. les valeurs front L, rear ect ne sont pas cohérente.
il faut que je vois ta config . complete.
sinon tes gyro marche normalement , bon il y aura pas mal de fignolage par la suite.
pendant toute la serie d essai, pas d helice, histoire de secu.
bon sans parlé de la config. gui et carte . en allumant radio en le quad avec la lipo, ca dit quoi ? (led de la carte, sa couleur)
attent voila ca;
http://www.google.fr/url?sa=t&rct=j&q=multiwii%20stick%20config&source=web&cd=1&sqi=2&ved=0CCQQFjAA&url=http%3A%2F%2Fmultiwii.googlecode.com%2Fsvn%2Fbranches%2FHamburger%2FMultiWii-StickConfiguration-18_v0-57721.pdf&ei=1ov0TqKiG8Pn8QOI7vHFAQ&usg=AFQjCNEpBrz_B-AvboBXsrm_DzTRsBX6HA&cad=rja
le recap des manip des sticks, pour l armement , desarm. ,calibrage ect...
ben voila pour avancé un peut. mais il me faut ta config. si tu veux que je trouve le hik...
bon alors , avant toute chose ,il faut vérifier toute les voies emeteur et recepteur .
es possible de me mettre une copie de ta config. (arduino) histoire de voir ce qui cloche.le probleme doit venir de la config. des voies et leur affectation dans le sketsh. enfin c est une hypotese..
ce qui me fait dire ca , c est que sur ta video ,les jauges des voix n ont pas de valeurs normal, par exemple throttle ne doit pas etre a 1500 mais pas loin des 1000. les valeurs front L, rear ect ne sont pas cohérente.
il faut que je vois ta config . complete.
sinon tes gyro marche normalement , bon il y aura pas mal de fignolage par la suite.
pendant toute la serie d essai, pas d helice, histoire de secu.
bon sans parlé de la config. gui et carte . en allumant radio en le quad avec la lipo, ca dit quoi ? (led de la carte, sa couleur)
attent voila ca;
http://www.google.fr/url?sa=t&rct=j&q=multiwii%20stick%20config&source=web&cd=1&sqi=2&ved=0CCQQFjAA&url=http%3A%2F%2Fmultiwii.googlecode.com%2Fsvn%2Fbranches%2FHamburger%2FMultiWii-StickConfiguration-18_v0-57721.pdf&ei=1ov0TqKiG8Pn8QOI7vHFAQ&usg=AFQjCNEpBrz_B-AvboBXsrm_DzTRsBX6HA&cad=rja
le recap des manip des sticks, pour l armement , desarm. ,calibrage ect...
ben voila pour avancé un peut. mais il me faut ta config. si tu veux que je trouve le hik...
rik27- Messages : 778
Date d'inscription : 02/05/2011
![]()
![]()
Re: Projet Multiwiicopter QUAD X
![]() rik27 Ven 23 Déc - 14:41
rik27 Ven 23 Déc - 14:41
il faudra aussi, ci c est pas fait, calibré la voie des gaz des controleurs 1 par 1.
branché le controleur sur la voie des gaz(throttle) du
recepteur, moteur relié (sans helices)
. allumé la radio, mettre le manche des gaz a fond en haut, alimenté le controleur,(lipo)
il commencera a bipé, au bout du 2 eme bip, descendre le manche en bas.
pour le timing ont vera plus tard, il doit surement etre d origine sur auto. ce qu il faut.
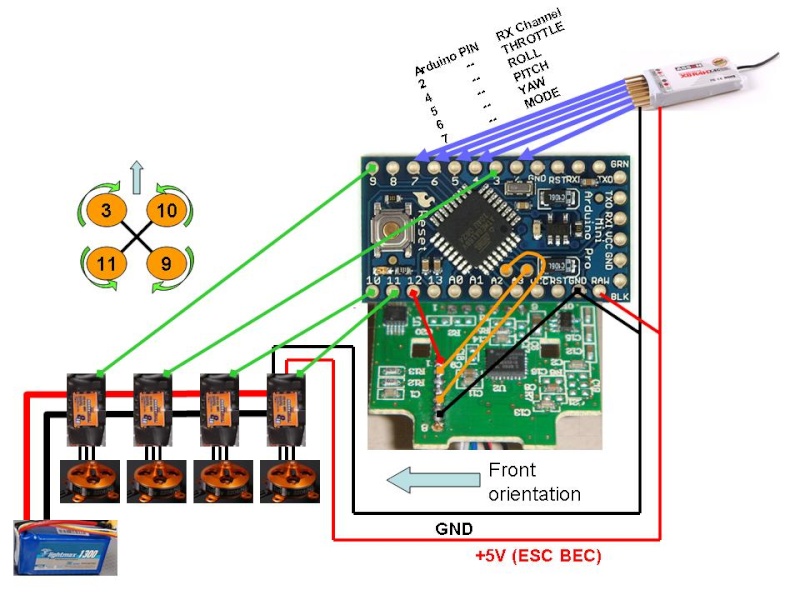
une ptite photos de l affectation des moteur et sens de rotation :

branché le controleur sur la voie des gaz(throttle) du
recepteur, moteur relié (sans helices)
. allumé la radio, mettre le manche des gaz a fond en haut, alimenté le controleur,(lipo)
il commencera a bipé, au bout du 2 eme bip, descendre le manche en bas.
pour le timing ont vera plus tard, il doit surement etre d origine sur auto. ce qu il faut.
une ptite photos de l affectation des moteur et sens de rotation :
rik27- Messages : 778
Date d'inscription : 02/05/2011
![]()
![]()
Re: Projet Multiwiicopter QUAD X
![]() Julien Ven 23 Déc - 14:47
Julien Ven 23 Déc - 14:47
Bonjour rik27,
Avant de commencer, je tien à te remercier pour le coup de main !
J'ai également noté ce matin en re-re-re gardant ma vidéo que les petites barres
représentant les jauge de sollicitation des moteur clochaient. Je diras même ne fonctionne pas !
Concernant le code de ma config, j'ai injecté le 1_9 tel quel. Au regard de ta formulation je ressent comme un malaise... Oups ! Fallait y faire des changements ?!... J'avais bien vérifié que la valeur de l'appareil était bien sur "quadX" mais le reste me semble proche des hiéroglyphe
Compte tenu que tu fait allusion aux voies, il est peut être nécessaire que je précise que j'ai mis ma radio en mode 2 (ou peut etre pas..)
Je vais faire une vidéo dans quelques minutes pour te permettre de visualiser les clignotements de la carte.
Le voici donc :
/*******************************/
/****CONFIGURABLE PARAMETERS****/
/*******************************/
/* Set the minimum throttle command sent to the ESC (Electronic Speed Controller)
This is the minimum value that allow motors to run at a idle speed */
//#define MINTHROTTLE 1300 // for Turnigy Plush ESCs 10A
//#define MINTHROTTLE 1120 // for Super Simple ESCs 10A
//#define MINTHROTTLE 1220
#define MINTHROTTLE 1150
/* The type of multicopter */
//#define GIMBAL
//#define BI
//#define TRI
//#define QUADP
#define QUADX
//#define Y4
//#define Y6
//#define HEX6
//#define HEX6X
//#define OCTOX8
//#define OCTOFLATP
//#define OCTOFLATX
//#define FLYING_WING //experimental
#define YAW_DIRECTION 1 // if you want to reverse the yaw correction direction
//#define YAW_DIRECTION -1
#define I2C_SPEED 100000L //100kHz normal mode, this value must be used for a genuine WMP
//#define I2C_SPEED 400000L //400kHz fast mode, it works only with some WMP clones
//enable internal I2C pull ups
#define INTERNAL_I2C_PULLUPS
//****** advanced users settings *************
/* This option should be uncommented if ACC Z is accurate enough when motors are running*/
//#define TRUSTED_ACCZ
/* PIN A0 and A1 instead of PIN D5 & D6 for 6 motors config and promini config
This mod allow the use of a standard receiver on a pro mini
(no need to use a PPM sum receiver)
*/
//#define A0_A1_PIN_HEX
/* possibility to use PIN8 or PIN12 as the AUX2 RC input
it deactivates in this case the POWER PIN (pin 12) or the BUZZER PIN (pin
*/
//#define RCAUXPIN8
//#define RCAUXPIN12
/* This option is here if you want to use the old level code from the verison 1.7
It's just to have some feedback. This will be removed in the future */
//#define STAB_OLD_17
/* GPS
only available on MEGA boards (this might be possible on 328 based boards in the future)
if enabled, define here the Arduino Serial port number and the UART speed
note: only the RX PIN is used, the GPS is not configured by multiwii
the GPS must be configured to output NMEA sentences (which is generally the default conf for most GPS devices)
*/
//#define GPS
//#define GPS_SERIAL Serial3 // should be Serial2 for flyduino v2
//#define GPS_BAUD 4800
//#define GPS_BAUD 9600
/* Pseudo-derivative conrtroller for level mode (experimental)
Additional information: http://www.multiwii.com/forum/viewtopic.php?f=8&t=503 */
//#define LEVEL_PDF
/* introduce a deadband around the stick center
Must be greater than zero, comment if you dont want a deadband on roll, pitch and yaw */
//#define DEADBAND 6
/* if you use a specific sensor board:
please submit any correction to this list.
Note from Alex: I only own some boards
for other boards, I'm not sure, the info was gathered via rc forums, be cautious */
//#define FFIMUv1 // first 9DOF+baro board from Jussi, with HMC5843 <- confirmed by Alex
//#define FFIMUv2 // second version of 9DOF+baro board from Jussi, with HMC5883 <- confirmed by Alex
//#define FREEIMUv1 // v0.1 & v0.2 & v0.3 version of 9DOF board from Fabio
//#define FREEIMUv03 // FreeIMU v0.3 and v0.3.1
//#define FREEIMUv035 // FreeIMU v0.3.5 no baro
//#define FREEIMUv035_MS // FreeIMU v0.3.5_MS <- confirmed by Alex
//#define FREEIMUv035_BMP // FreeIMU v0.3.5_BMP
//#define PIPO // 9DOF board from erazz
//#define QUADRINO // full FC board 9DOF+baro board from witespy with BMP085 baro <- confirmed by Alex
//#define QUADRINO_ZOOM // full FC board 9DOF+baro board from witespy second edition <- confirmed by Alex
//#define ALLINONE // full FC board or standalone 9DOF+baro board from CSG_EU
//#define AEROQUADSHIELDv2
//#define ATAVRSBIN1 // Atmel 9DOF (Contribution by EOSBandi). requires 3.3V power.
//#define SIRIUS // Sirius Navigator IMU <- confirmed by Alex
//#define SIRIUS600 // Sirius Navigator IMU using the WMP for the gyro
//#define MINIWII // Jussi's MiniWii Flight Controller
//#define CITRUSv1_0 // CITRUSv1 from qcrc.ca
//#define DROTEK_IMU10DOF
//if you use independent sensors
//leave it commented it you already checked a specific board above
/* I2C gyroscope */
//#define ITG3200
//#define L3G4200D
/* I2C accelerometer */
//#define ADXL345
//#define BMA020
//#define BMA180
//#define NUNCHACK // if you want to use the nunckuk as a standalone I2C ACC without WMP
//#define LIS3LV02
//#define LSM303DLx_ACC
/* I2C barometer */
//#define BMP085
//#define MS561101BA
/* I2C magnetometer */
//#define HMC5843
//#define HMC5883
//#define AK8975
/* ADC accelerometer */ // for 5DOF from sparkfun, uses analog PIN A1/A2/A3
//#define ADCACC
/* ITG3200 & ITG3205 Low pass filter setting. In case you cannot eliminate all vibrations to the Gyro, you can try
to decrease the LPF frequency, only one step per try. As soon as twitching gone, stick with that setting.
It will not help on feedback wobbles, so change only when copter is randomly twiching and all dampening and
balancing options ran out. Uncomment only one option!
IMPORTANT! Change low pass filter setting changes PID behaviour, so retune your PID's after changing LPF.*/
//#define ITG3200_LPF_256HZ // This is the default setting, no need to uncomment, just for reference
//#define ITG3200_LPF_188HZ
//#define ITG3200_LPF_98HZ
//#define ITG3200_LPF_42HZ
//#define ITG3200_LPF_20HZ
//#define ITG3200_LPF_10HZ // Use this only in extreme cases, rather change motors and/or props
/* The following lines apply only for specific receiver with only one PPM sum signal, on digital PIN 2
IF YOUR RECEIVER IS NOT CONCERNED, DON'T UNCOMMENT ANYTHING. Note this is mandatory for a Y6 setup on a promini
Select the right line depending on your radio brand. Feel free to modify the order in your PPM order is different */
//#define SERIAL_SUM_PPM PITCH,YAW,THROTTLE,ROLL,AUX1,AUX2,CAMPITCH,CAMROLL //For Graupner/Spektrum
//#define SERIAL_SUM_PPM ROLL,PITCH,THROTTLE,YAW,AUX1,AUX2,CAMPITCH,CAMROLL //For Robe/Hitec/Futaba
//#define SERIAL_SUM_PPM PITCH,ROLL,THROTTLE,YAW,AUX1,AUX2,CAMPITCH,CAMROLL //For some Hitec/Sanwa/Others
/* The following lines apply only for Spektrum Satellite Receiver
Spektrum Satellites are 3V devices. DO NOT connect to 5V!
For MEGA boards, attach sat grey wire to RX1, pin 19. Sat black wire to ground. Sat orange wire to Mega board's 3.3V (or any other 3V to 3.3V source).
For PROMINI, attach sat grey to RX0. Attach sat black to ground.
There is no 3.3V source on a pro mini; you can either use a different 3V source, or attach orange to 5V with a 3V regulator in-line (such as http://search.digikey.com/scripts/DkSearch/dksus.dll?Detail&name=MCP1700-3002E/TO-ND)
If you use an inline-regulator, a standard 3-pin servo connector can connect to ground, +5V, and RX0; solder the correct wires (and the 3V regulator!) to a Spektrum baseRX-to-Sat cable that has been cut in half.
NOTE: Because there is only one serial port on the Pro Mini, using a Spektrum Satellite implies you CANNOT use the PC based configuration tool. Further, you cannot use on-aircraft serial LCD as the baud rates are incompatible. You can configure by one of two methods:
1) Coming soon: Use an on-aircraft Eagle Tree LCD for setting gains, reading sensors, etc.
2) Available now: Comment out the Spektrum definition, upload, plug in PC, configure; uncomment the Spektrum definition, upload, plug in RX, and fly. Repeat as required to configure.
(Contribution by Danal) */
//#define SPEKTRUM 1024
//#define SPEKTRUM 2048
/* EXPERIMENTAL !!
contribution from Captain IxI and Zaggo
cf http://www.multiwii.com/forum/viewtopic.php?f=7&t=289
The following line apply only for Futaba S-Bus Receiver on MEGA boards at RX1 only (Serial 1).
You have to invert the S-Bus-Serial Signal e.g. with a Hex-Inverter like IC SN74 LS 04 */
//#define SBUS
/* Failsave settings - added by MIS
Failsafe check pulse on THROTTLE channel. If the pulse is OFF (on only THROTTLE or on all channels) the failsafe procedure is initiated.
After FAILSAVE_DELAY time of pulse absence, the level mode is on (if ACC or nunchuk is avaliable), PITCH, ROLL and YAW is centered
and THROTTLE is set to FAILSAVE_THR0TTLE value. You must set this value to descending about 1m/s or so for best results.
This value is depended from your configuration, AUW and some other params.
Next, afrer FAILSAVE_OFF_DELAY the copter is disarmed, and motors is stopped.
If RC pulse coming back before reached FAILSAVE_OFF_DELAY time, after the small quard time the RC control is returned to normal.
If you use serial sum PPM, the sum converter must completly turn off the PPM SUM pusles for this FailSafe functionality.*/
#define FAILSAFE // Alex: comment this line if you want to deactivate the failsafe function
#define FAILSAVE_DELAY 10 // Guard time for failsafe activation after signal lost. 1 step = 0.1sec - 1sec in example
#define FAILSAVE_OFF_DELAY 200 // Time for Landing before motors stop in 0.1sec. 1 step = 0.1sec - 20sec in example
#define FAILSAVE_THR0TTLE (MINTHROTTLE + 200) // Throttle level used for landing - may be relative to MINTHROTTLE - as in this case
/* EXPERIMENTAL !!
contribution from Luis Correia
see http://www.multiwii.com/forum/viewtopic.php?f=18&t=828
It uses a Bluetooth Serial module as the input for controlling the device via an Android application
As with the SPEKTRUM option, is not possible to use the configuration tool on a mini or promini. */
//#define BTSERIAL
/* The following lines apply only for a pitch/roll tilt stabilization system
On promini board, it is not compatible with config with 6 motors or more
Uncomment the first line to activate it */
//#define SERVO_TILT
#define TILT_PITCH_MIN 1020 //servo travel min, don't set it below 1020
#define TILT_PITCH_MAX 2000 //servo travel max, max value=2000
#define TILT_PITCH_MIDDLE 1500 //servo neutral value
#define TILT_PITCH_PROP 10 //servo proportional (tied to angle) ; can be negative to invert movement
#define TILT_ROLL_MIN 1020
#define TILT_ROLL_MAX 2000
#define TILT_ROLL_MIDDLE 1500
#define TILT_ROLL_PROP 10
/* interleaving delay in micro seconds between 2 readings WMP/NK in a WMP+NK config
if the ACC calibration time is very long (20 or 30s), try to increase this delay up to 4000
it is relevent only for a conf with NK */
#define INTERLEAVING_DELAY 3000
/* for V BAT monitoring
after the resistor divisor we should get [0V;5V]->[0;1023] on analog V_BATPIN
with R1=33k and R2=51k
vbat = [0;1023]*16/VBATSCALE */
#define VBAT // comment this line to suppress the vbat code
#define VBATSCALE 131 // change this value if readed Battery voltage is different than real voltage
#define VBATLEVEL1_3S 107 // 10,7V
#define VBATLEVEL2_3S 103 // 10,3V
#define VBATLEVEL3_3S 99 // 9.9V
#define NO_VBAT 16 // Avoid beeping without any battery
/* when there is an error on I2C bus, we neutralize the values during a short time. expressed in microseconds
it is relevent only for a conf with at least a WMP */
#define NEUTRALIZE_DELAY 100000
/* this is the value for the ESCs when they are not armed
in some cases, this value must be lowered down to 900 for some specific ESCs */
#define MINCOMMAND 1000
/* this is the maximum value for the ESCs at full power
this value can be increased up to 2000 */
#define MAXTHROTTLE 1850
/* This is the speed of the serial interface. 115200 kbit/s is the best option for a USB connection.*/
#define SERIAL_COM_SPEED 115200
/* In order to save space, it's possibile to desactivate the LCD configuration functions
comment this line only if you don't plan to used a LCD */
#define LCD_CONF
/* To use an Eagle Tree Power Panel LCD for configuration, uncomment this line
White wire to Ground
Red wire to +5V VCC (or to the WMP power pin, if you prefer to reset everything on the bus when WMP resets)
Yellow wire to SDA - Pin A4 Mini Pro - Pin 20 Mega
Brown wire to SCL - Pin A5 Mini Pro - Pin 21 Mega
(Contribution by Danal) */
//#define LCD_ETPP
/* to use Cat's whisker TEXTSTAR LCD, uncomment following line.
Pleae note this display needs a full 4 wire connection to (+5V, Gnd, RXD, TXD )
Configure display as follows: 115K baud, and TTL levels for RXD and TXD, terminal mode
NO rx / tx line reconfiguration, use natural pins */
//#define LCD_TEXTSTAR
/* motors will not spin when the throttle command is in low position
this is an alternative method to stop immediately the motors */
//#define MOTOR_STOP
/* some radios have not a neutral point centered on 1500. can be changed here */
#define MIDRC 1500
/* experimental
camera trigger function : activated via Rc Options in the GUI, servo output=A2 on promini */
//#define CAMTRIG
#define CAM_SERVO_HIGH 2000 // the position of HIGH state servo
#define CAM_SERVO_LOW 1020 // the position of LOW state servo
#define CAM_TIME_HIGH 1000 // the duration of HIGH state servo expressed in ms
#define CAM_TIME_LOW 1000 // the duration of LOW state servo expressed in ms
/* you can change the tricopter servo travel here */
#define TRI_YAW_CONSTRAINT_MIN 1020
#define TRI_YAW_CONSTRAINT_MAX 2000
#define TRI_YAW_MIDDLE 1500
/* Flying Wing: you can change change servo orientation and servo min/max values here */
/* valid for all flight modes, even passThrough mode */
/* need to setup servo directions here; no need to swap servos amongst channels at rx */
#define PITCH_DIRECTION_L 1 // left servo - pitch orientation
#define PITCH_DIRECTION_R -1 // right servo - pitch orientation (opposite sign to PITCH_DIRECTION_L, if servos are mounted in mirrored orientation)
#define ROLL_DIRECTION_L 1 // left servo - roll orientation
#define ROLL_DIRECTION_R 1 // right servo - roll orientation (same sign as ROLL_DIRECTION_L, if servos are mounted in mirrored orientation)
#define WING_LEFT_MID 1500 // left servo center pos. - use this for trim
#define WING_RIGHT_MID 1500 // right servo center pos. - use this for trim
#define WING_LEFT_MIN 1020 // limit servo travel range must be inside [1020;2000]
#define WING_LEFT_MAX 2000 // limit servo travel range must be inside [1020;2000]
#define WING_RIGHT_MIN 1020 // limit servo travel range must be inside [1020;2000]
#define WING_RIGHT_MAX 2000 // limit servo travel range must be inside [1020;2000]
/* enable monitoring of the power consumption from battery (think of mAh) */
/* allows to set alarm value in GUI or via LCD */
/* Two options: */
/* 1 - soft: - (good results +-5% for plush and mystery ESCs @ 2S and 3S, not good with SuperSimple ESC */
/* 00. relies on your combo of battery type (Voltage, cpacity), ESC, ESC settings, motors, props and multiwii cycle time */
/* 01. set POWERMETER soft. Uses PLEVELSCALE = 50, PLEVELDIV = PLEVELDIVSOFT = 10000 */
/* 0. output is a value that linearily scales to power (mAh) */
/* 1. get voltage reading right first */
/* 2. start with freshly charged battery */
/* 3. go fly your typical flight (routine and duration) */
/* 4. at end connect to GUI or LCD and read the power value; write it down (example 4711)*/
/* 5. charge battery, write down amount of energy needed (example 722 mAh) */
/* 6. compute alarm value for desired power threshold (example 750 mAh : alarm = 4711 / 722 * 750) */
/* 7. set alarm value in GUI or LCD */
/* 8. enjoy your new battery alarm - possibly repeat steps 2 .. 7 */
/* 9. if you want the numbers to represent your mAh value, you must change PLEVELDIV */
/* 2 - hard: - (uses hardware sensor, after configuration gives reasonable results */
/* 00. uses analog pin 2 to read voltage output from sensor. */
/* 01. set POWERMETER hard. Uses PLEVELSCALE = 50 */
/* 02. install low path filter for 25 Hz to sensor input */
/* 1. compute PLEVELDIV for your sensor (see below for insturctions) */
/* 2. set PLEVELDIVSOFT to 10000 ( to use LOG_VALUES for individual motor comparison) */
/* 3. attach, set PSENSORNULL and PINT2mA */
/* 4. configure, compile, upload, set alarm value in GUI or LCD */
/* 3. enjoy true readings of mAh consumed */
/* set POWERMETER to "soft" (1) or "hard" (2) depending on sensor you want to utilize */
//#define POWERMETER 1
//#define POWERMETER 2
/* the sum of all powermeters ranges from [0:60000 e4] theoretically. */
/* the alarm level from eeprom is out of [0:255], so we multipy alarm level with PLEVELSCALE and with 1e4 before comparing */
/* PLEVELSCALE is the step size you can use to set alarm */
#define PLEVELSCALE 50 // if you change this value for other granularity, you must search for comments in code to change accordingly
/* larger PLEVELDIV will get you smaller value for power (mAh equivalent) */
#define PLEVELDIV 10000 // default for soft - if you lower PLEVELDIV, beware of overrun in uint32 pMeter
#define PLEVELDIVSOFT PLEVELDIV // for soft always equal to PLEVELDIV; for hard set to 10000
//#define PLEVELDIV 1361L // to convert the sum into mAh divide by this value
/* amploc 25A sensor has 37mV/A */
/* arduino analog resolution is 4.9mV per unit; units from [0..1023] */
/* sampling rate 20ms, approx 19977 micro seconds */
/* PLEVELDIV = 37 / 4.9 * 10e6 / 19977 * 3600 / 1000 = 1361L */
/* set to analogRead() value for zero current */
#define PSENSORNULL 510 // for I=0A my sensor gives 1/2 Vss; that is approx 2.49Volt
#define PINT2mA 13 // for telemtry display: one integer step on arduino analog translates to mA (example 4.9 / 37 * 100
/* to monitor system values (battery level, loop time etc. with LCD enable this */
/* note: for now you must send single characters 'A', 'B', 'C', 'D' to request 4 different pages */
/* Buttons toggle request for page on/off */
/* The active page on the LCD does get updated automatically */
/* Easy to use with Terminal application or Textstar LCD - the 4 buttons are preconfigured to send 'A', 'B', 'C', 'D' */
/* The value represents the refresh interval in cpu time (micro seconds) */
//#define LCD_TELEMETRY 100011
/* to enable automatic hopping between 4 telemetry pages uncomment this. */
/* This may be useful if your LCD has no buttons or the sending is broken */
/* hopping is activated and deactivated in unarmed mode with throttle=low & roll=left & pitch=forward */
/* The value represents the hopping interval in cpu time (micro seconds) */
//#define LCD_TELEMETRY_AUTO 2000123
/* on telemetry page B it gives a bar graph which shows how much voltage battery has left. Range from 0 to 12 Volt is not very informative */
/* so we try do define a meaningful part. For a 3S battery we define full=12,6V and calculate how much it is above first warning level */
/* Example: 12.6V - VBATLEVEL1_3S (for me = 126 - 102 = 24) */
#define VBATREF 24
/* to log values like max loop time and others to come */
/* logging values are visible via LCD config */
//#define LOG_VALUES
//****** end of advanced users settings *************
//if you want to change to orientation of individual sensor
//#define ACC_ORIENTATION(X, Y, Z) {accADC[ROLL] = Y; accADC[PITCH] = -X; accADC[YAW] = Z;}
//#define GYRO_ORIENTATION(X, Y, Z) {gyroADC[ROLL] = -Y; gyroADC[PITCH] = X; gyroADC[YAW] = Z;}
//#define MAG_ORIENTATION(X, Y, Z) {magADC[ROLL] = X; magADC[PITCH] = Y; magADC[YAW] = Z;}
/**************************************/
/****END OF CONFIGURABLE PARAMETERS****/
/**************************************/
Avant de commencer, je tien à te remercier pour le coup de main !
J'ai également noté ce matin en re-re-re gardant ma vidéo que les petites barres
représentant les jauge de sollicitation des moteur clochaient. Je diras même ne fonctionne pas !
Concernant le code de ma config, j'ai injecté le 1_9 tel quel. Au regard de ta formulation je ressent comme un malaise... Oups ! Fallait y faire des changements ?!... J'avais bien vérifié que la valeur de l'appareil était bien sur "quadX" mais le reste me semble proche des hiéroglyphe
Compte tenu que tu fait allusion aux voies, il est peut être nécessaire que je précise que j'ai mis ma radio en mode 2 (ou peut etre pas..)
Je vais faire une vidéo dans quelques minutes pour te permettre de visualiser les clignotements de la carte.
Le voici donc :
/*******************************/
/****CONFIGURABLE PARAMETERS****/
/*******************************/
/* Set the minimum throttle command sent to the ESC (Electronic Speed Controller)
This is the minimum value that allow motors to run at a idle speed */
//#define MINTHROTTLE 1300 // for Turnigy Plush ESCs 10A
//#define MINTHROTTLE 1120 // for Super Simple ESCs 10A
//#define MINTHROTTLE 1220
#define MINTHROTTLE 1150
/* The type of multicopter */
//#define GIMBAL
//#define BI
//#define TRI
//#define QUADP
#define QUADX
//#define Y4
//#define Y6
//#define HEX6
//#define HEX6X
//#define OCTOX8
//#define OCTOFLATP
//#define OCTOFLATX
//#define FLYING_WING //experimental
#define YAW_DIRECTION 1 // if you want to reverse the yaw correction direction
//#define YAW_DIRECTION -1
#define I2C_SPEED 100000L //100kHz normal mode, this value must be used for a genuine WMP
//#define I2C_SPEED 400000L //400kHz fast mode, it works only with some WMP clones
//enable internal I2C pull ups
#define INTERNAL_I2C_PULLUPS
//****** advanced users settings *************
/* This option should be uncommented if ACC Z is accurate enough when motors are running*/
//#define TRUSTED_ACCZ
/* PIN A0 and A1 instead of PIN D5 & D6 for 6 motors config and promini config
This mod allow the use of a standard receiver on a pro mini
(no need to use a PPM sum receiver)
*/
//#define A0_A1_PIN_HEX
/* possibility to use PIN8 or PIN12 as the AUX2 RC input
it deactivates in this case the POWER PIN (pin 12) or the BUZZER PIN (pin
*/
//#define RCAUXPIN8
//#define RCAUXPIN12
/* This option is here if you want to use the old level code from the verison 1.7
It's just to have some feedback. This will be removed in the future */
//#define STAB_OLD_17
/* GPS
only available on MEGA boards (this might be possible on 328 based boards in the future)
if enabled, define here the Arduino Serial port number and the UART speed
note: only the RX PIN is used, the GPS is not configured by multiwii
the GPS must be configured to output NMEA sentences (which is generally the default conf for most GPS devices)
*/
//#define GPS
//#define GPS_SERIAL Serial3 // should be Serial2 for flyduino v2
//#define GPS_BAUD 4800
//#define GPS_BAUD 9600
/* Pseudo-derivative conrtroller for level mode (experimental)
Additional information: http://www.multiwii.com/forum/viewtopic.php?f=8&t=503 */
//#define LEVEL_PDF
/* introduce a deadband around the stick center
Must be greater than zero, comment if you dont want a deadband on roll, pitch and yaw */
//#define DEADBAND 6
/* if you use a specific sensor board:
please submit any correction to this list.
Note from Alex: I only own some boards
for other boards, I'm not sure, the info was gathered via rc forums, be cautious */
//#define FFIMUv1 // first 9DOF+baro board from Jussi, with HMC5843 <- confirmed by Alex
//#define FFIMUv2 // second version of 9DOF+baro board from Jussi, with HMC5883 <- confirmed by Alex
//#define FREEIMUv1 // v0.1 & v0.2 & v0.3 version of 9DOF board from Fabio
//#define FREEIMUv03 // FreeIMU v0.3 and v0.3.1
//#define FREEIMUv035 // FreeIMU v0.3.5 no baro
//#define FREEIMUv035_MS // FreeIMU v0.3.5_MS <- confirmed by Alex
//#define FREEIMUv035_BMP // FreeIMU v0.3.5_BMP
//#define PIPO // 9DOF board from erazz
//#define QUADRINO // full FC board 9DOF+baro board from witespy with BMP085 baro <- confirmed by Alex
//#define QUADRINO_ZOOM // full FC board 9DOF+baro board from witespy second edition <- confirmed by Alex
//#define ALLINONE // full FC board or standalone 9DOF+baro board from CSG_EU
//#define AEROQUADSHIELDv2
//#define ATAVRSBIN1 // Atmel 9DOF (Contribution by EOSBandi). requires 3.3V power.
//#define SIRIUS // Sirius Navigator IMU <- confirmed by Alex
//#define SIRIUS600 // Sirius Navigator IMU using the WMP for the gyro
//#define MINIWII // Jussi's MiniWii Flight Controller
//#define CITRUSv1_0 // CITRUSv1 from qcrc.ca
//#define DROTEK_IMU10DOF
//if you use independent sensors
//leave it commented it you already checked a specific board above
/* I2C gyroscope */
//#define ITG3200
//#define L3G4200D
/* I2C accelerometer */
//#define ADXL345
//#define BMA020
//#define BMA180
//#define NUNCHACK // if you want to use the nunckuk as a standalone I2C ACC without WMP
//#define LIS3LV02
//#define LSM303DLx_ACC
/* I2C barometer */
//#define BMP085
//#define MS561101BA
/* I2C magnetometer */
//#define HMC5843
//#define HMC5883
//#define AK8975
/* ADC accelerometer */ // for 5DOF from sparkfun, uses analog PIN A1/A2/A3
//#define ADCACC
/* ITG3200 & ITG3205 Low pass filter setting. In case you cannot eliminate all vibrations to the Gyro, you can try
to decrease the LPF frequency, only one step per try. As soon as twitching gone, stick with that setting.
It will not help on feedback wobbles, so change only when copter is randomly twiching and all dampening and
balancing options ran out. Uncomment only one option!
IMPORTANT! Change low pass filter setting changes PID behaviour, so retune your PID's after changing LPF.*/
//#define ITG3200_LPF_256HZ // This is the default setting, no need to uncomment, just for reference
//#define ITG3200_LPF_188HZ
//#define ITG3200_LPF_98HZ
//#define ITG3200_LPF_42HZ
//#define ITG3200_LPF_20HZ
//#define ITG3200_LPF_10HZ // Use this only in extreme cases, rather change motors and/or props
/* The following lines apply only for specific receiver with only one PPM sum signal, on digital PIN 2
IF YOUR RECEIVER IS NOT CONCERNED, DON'T UNCOMMENT ANYTHING. Note this is mandatory for a Y6 setup on a promini
Select the right line depending on your radio brand. Feel free to modify the order in your PPM order is different */
//#define SERIAL_SUM_PPM PITCH,YAW,THROTTLE,ROLL,AUX1,AUX2,CAMPITCH,CAMROLL //For Graupner/Spektrum
//#define SERIAL_SUM_PPM ROLL,PITCH,THROTTLE,YAW,AUX1,AUX2,CAMPITCH,CAMROLL //For Robe/Hitec/Futaba
//#define SERIAL_SUM_PPM PITCH,ROLL,THROTTLE,YAW,AUX1,AUX2,CAMPITCH,CAMROLL //For some Hitec/Sanwa/Others
/* The following lines apply only for Spektrum Satellite Receiver
Spektrum Satellites are 3V devices. DO NOT connect to 5V!
For MEGA boards, attach sat grey wire to RX1, pin 19. Sat black wire to ground. Sat orange wire to Mega board's 3.3V (or any other 3V to 3.3V source).
For PROMINI, attach sat grey to RX0. Attach sat black to ground.
There is no 3.3V source on a pro mini; you can either use a different 3V source, or attach orange to 5V with a 3V regulator in-line (such as http://search.digikey.com/scripts/DkSearch/dksus.dll?Detail&name=MCP1700-3002E/TO-ND)
If you use an inline-regulator, a standard 3-pin servo connector can connect to ground, +5V, and RX0; solder the correct wires (and the 3V regulator!) to a Spektrum baseRX-to-Sat cable that has been cut in half.
NOTE: Because there is only one serial port on the Pro Mini, using a Spektrum Satellite implies you CANNOT use the PC based configuration tool. Further, you cannot use on-aircraft serial LCD as the baud rates are incompatible. You can configure by one of two methods:
1) Coming soon: Use an on-aircraft Eagle Tree LCD for setting gains, reading sensors, etc.
2) Available now: Comment out the Spektrum definition, upload, plug in PC, configure; uncomment the Spektrum definition, upload, plug in RX, and fly. Repeat as required to configure.
(Contribution by Danal) */
//#define SPEKTRUM 1024
//#define SPEKTRUM 2048
/* EXPERIMENTAL !!
contribution from Captain IxI and Zaggo
cf http://www.multiwii.com/forum/viewtopic.php?f=7&t=289
The following line apply only for Futaba S-Bus Receiver on MEGA boards at RX1 only (Serial 1).
You have to invert the S-Bus-Serial Signal e.g. with a Hex-Inverter like IC SN74 LS 04 */
//#define SBUS
/* Failsave settings - added by MIS
Failsafe check pulse on THROTTLE channel. If the pulse is OFF (on only THROTTLE or on all channels) the failsafe procedure is initiated.
After FAILSAVE_DELAY time of pulse absence, the level mode is on (if ACC or nunchuk is avaliable), PITCH, ROLL and YAW is centered
and THROTTLE is set to FAILSAVE_THR0TTLE value. You must set this value to descending about 1m/s or so for best results.
This value is depended from your configuration, AUW and some other params.
Next, afrer FAILSAVE_OFF_DELAY the copter is disarmed, and motors is stopped.
If RC pulse coming back before reached FAILSAVE_OFF_DELAY time, after the small quard time the RC control is returned to normal.
If you use serial sum PPM, the sum converter must completly turn off the PPM SUM pusles for this FailSafe functionality.*/
#define FAILSAFE // Alex: comment this line if you want to deactivate the failsafe function
#define FAILSAVE_DELAY 10 // Guard time for failsafe activation after signal lost. 1 step = 0.1sec - 1sec in example
#define FAILSAVE_OFF_DELAY 200 // Time for Landing before motors stop in 0.1sec. 1 step = 0.1sec - 20sec in example
#define FAILSAVE_THR0TTLE (MINTHROTTLE + 200) // Throttle level used for landing - may be relative to MINTHROTTLE - as in this case
/* EXPERIMENTAL !!
contribution from Luis Correia
see http://www.multiwii.com/forum/viewtopic.php?f=18&t=828
It uses a Bluetooth Serial module as the input for controlling the device via an Android application
As with the SPEKTRUM option, is not possible to use the configuration tool on a mini or promini. */
//#define BTSERIAL
/* The following lines apply only for a pitch/roll tilt stabilization system
On promini board, it is not compatible with config with 6 motors or more
Uncomment the first line to activate it */
//#define SERVO_TILT
#define TILT_PITCH_MIN 1020 //servo travel min, don't set it below 1020
#define TILT_PITCH_MAX 2000 //servo travel max, max value=2000
#define TILT_PITCH_MIDDLE 1500 //servo neutral value
#define TILT_PITCH_PROP 10 //servo proportional (tied to angle) ; can be negative to invert movement
#define TILT_ROLL_MIN 1020
#define TILT_ROLL_MAX 2000
#define TILT_ROLL_MIDDLE 1500
#define TILT_ROLL_PROP 10
/* interleaving delay in micro seconds between 2 readings WMP/NK in a WMP+NK config
if the ACC calibration time is very long (20 or 30s), try to increase this delay up to 4000
it is relevent only for a conf with NK */
#define INTERLEAVING_DELAY 3000
/* for V BAT monitoring
after the resistor divisor we should get [0V;5V]->[0;1023] on analog V_BATPIN
with R1=33k and R2=51k
vbat = [0;1023]*16/VBATSCALE */
#define VBAT // comment this line to suppress the vbat code
#define VBATSCALE 131 // change this value if readed Battery voltage is different than real voltage
#define VBATLEVEL1_3S 107 // 10,7V
#define VBATLEVEL2_3S 103 // 10,3V
#define VBATLEVEL3_3S 99 // 9.9V
#define NO_VBAT 16 // Avoid beeping without any battery
/* when there is an error on I2C bus, we neutralize the values during a short time. expressed in microseconds
it is relevent only for a conf with at least a WMP */
#define NEUTRALIZE_DELAY 100000
/* this is the value for the ESCs when they are not armed
in some cases, this value must be lowered down to 900 for some specific ESCs */
#define MINCOMMAND 1000
/* this is the maximum value for the ESCs at full power
this value can be increased up to 2000 */
#define MAXTHROTTLE 1850
/* This is the speed of the serial interface. 115200 kbit/s is the best option for a USB connection.*/
#define SERIAL_COM_SPEED 115200
/* In order to save space, it's possibile to desactivate the LCD configuration functions
comment this line only if you don't plan to used a LCD */
#define LCD_CONF
/* To use an Eagle Tree Power Panel LCD for configuration, uncomment this line
White wire to Ground
Red wire to +5V VCC (or to the WMP power pin, if you prefer to reset everything on the bus when WMP resets)
Yellow wire to SDA - Pin A4 Mini Pro - Pin 20 Mega
Brown wire to SCL - Pin A5 Mini Pro - Pin 21 Mega
(Contribution by Danal) */
//#define LCD_ETPP
/* to use Cat's whisker TEXTSTAR LCD, uncomment following line.
Pleae note this display needs a full 4 wire connection to (+5V, Gnd, RXD, TXD )
Configure display as follows: 115K baud, and TTL levels for RXD and TXD, terminal mode
NO rx / tx line reconfiguration, use natural pins */
//#define LCD_TEXTSTAR
/* motors will not spin when the throttle command is in low position
this is an alternative method to stop immediately the motors */
//#define MOTOR_STOP
/* some radios have not a neutral point centered on 1500. can be changed here */
#define MIDRC 1500
/* experimental
camera trigger function : activated via Rc Options in the GUI, servo output=A2 on promini */
//#define CAMTRIG
#define CAM_SERVO_HIGH 2000 // the position of HIGH state servo
#define CAM_SERVO_LOW 1020 // the position of LOW state servo
#define CAM_TIME_HIGH 1000 // the duration of HIGH state servo expressed in ms
#define CAM_TIME_LOW 1000 // the duration of LOW state servo expressed in ms
/* you can change the tricopter servo travel here */
#define TRI_YAW_CONSTRAINT_MIN 1020
#define TRI_YAW_CONSTRAINT_MAX 2000
#define TRI_YAW_MIDDLE 1500
/* Flying Wing: you can change change servo orientation and servo min/max values here */
/* valid for all flight modes, even passThrough mode */
/* need to setup servo directions here; no need to swap servos amongst channels at rx */
#define PITCH_DIRECTION_L 1 // left servo - pitch orientation
#define PITCH_DIRECTION_R -1 // right servo - pitch orientation (opposite sign to PITCH_DIRECTION_L, if servos are mounted in mirrored orientation)
#define ROLL_DIRECTION_L 1 // left servo - roll orientation
#define ROLL_DIRECTION_R 1 // right servo - roll orientation (same sign as ROLL_DIRECTION_L, if servos are mounted in mirrored orientation)
#define WING_LEFT_MID 1500 // left servo center pos. - use this for trim
#define WING_RIGHT_MID 1500 // right servo center pos. - use this for trim
#define WING_LEFT_MIN 1020 // limit servo travel range must be inside [1020;2000]
#define WING_LEFT_MAX 2000 // limit servo travel range must be inside [1020;2000]
#define WING_RIGHT_MIN 1020 // limit servo travel range must be inside [1020;2000]
#define WING_RIGHT_MAX 2000 // limit servo travel range must be inside [1020;2000]
/* enable monitoring of the power consumption from battery (think of mAh) */
/* allows to set alarm value in GUI or via LCD */
/* Two options: */
/* 1 - soft: - (good results +-5% for plush and mystery ESCs @ 2S and 3S, not good with SuperSimple ESC */
/* 00. relies on your combo of battery type (Voltage, cpacity), ESC, ESC settings, motors, props and multiwii cycle time */
/* 01. set POWERMETER soft. Uses PLEVELSCALE = 50, PLEVELDIV = PLEVELDIVSOFT = 10000 */
/* 0. output is a value that linearily scales to power (mAh) */
/* 1. get voltage reading right first */
/* 2. start with freshly charged battery */
/* 3. go fly your typical flight (routine and duration) */
/* 4. at end connect to GUI or LCD and read the power value; write it down (example 4711)*/
/* 5. charge battery, write down amount of energy needed (example 722 mAh) */
/* 6. compute alarm value for desired power threshold (example 750 mAh : alarm = 4711 / 722 * 750) */
/* 7. set alarm value in GUI or LCD */
/* 8. enjoy your new battery alarm - possibly repeat steps 2 .. 7 */
/* 9. if you want the numbers to represent your mAh value, you must change PLEVELDIV */
/* 2 - hard: - (uses hardware sensor, after configuration gives reasonable results */
/* 00. uses analog pin 2 to read voltage output from sensor. */
/* 01. set POWERMETER hard. Uses PLEVELSCALE = 50 */
/* 02. install low path filter for 25 Hz to sensor input */
/* 1. compute PLEVELDIV for your sensor (see below for insturctions) */
/* 2. set PLEVELDIVSOFT to 10000 ( to use LOG_VALUES for individual motor comparison) */
/* 3. attach, set PSENSORNULL and PINT2mA */
/* 4. configure, compile, upload, set alarm value in GUI or LCD */
/* 3. enjoy true readings of mAh consumed */
/* set POWERMETER to "soft" (1) or "hard" (2) depending on sensor you want to utilize */
//#define POWERMETER 1
//#define POWERMETER 2
/* the sum of all powermeters ranges from [0:60000 e4] theoretically. */
/* the alarm level from eeprom is out of [0:255], so we multipy alarm level with PLEVELSCALE and with 1e4 before comparing */
/* PLEVELSCALE is the step size you can use to set alarm */
#define PLEVELSCALE 50 // if you change this value for other granularity, you must search for comments in code to change accordingly
/* larger PLEVELDIV will get you smaller value for power (mAh equivalent) */
#define PLEVELDIV 10000 // default for soft - if you lower PLEVELDIV, beware of overrun in uint32 pMeter
#define PLEVELDIVSOFT PLEVELDIV // for soft always equal to PLEVELDIV; for hard set to 10000
//#define PLEVELDIV 1361L // to convert the sum into mAh divide by this value
/* amploc 25A sensor has 37mV/A */
/* arduino analog resolution is 4.9mV per unit; units from [0..1023] */
/* sampling rate 20ms, approx 19977 micro seconds */
/* PLEVELDIV = 37 / 4.9 * 10e6 / 19977 * 3600 / 1000 = 1361L */
/* set to analogRead() value for zero current */
#define PSENSORNULL 510 // for I=0A my sensor gives 1/2 Vss; that is approx 2.49Volt
#define PINT2mA 13 // for telemtry display: one integer step on arduino analog translates to mA (example 4.9 / 37 * 100
/* to monitor system values (battery level, loop time etc. with LCD enable this */
/* note: for now you must send single characters 'A', 'B', 'C', 'D' to request 4 different pages */
/* Buttons toggle request for page on/off */
/* The active page on the LCD does get updated automatically */
/* Easy to use with Terminal application or Textstar LCD - the 4 buttons are preconfigured to send 'A', 'B', 'C', 'D' */
/* The value represents the refresh interval in cpu time (micro seconds) */
//#define LCD_TELEMETRY 100011
/* to enable automatic hopping between 4 telemetry pages uncomment this. */
/* This may be useful if your LCD has no buttons or the sending is broken */
/* hopping is activated and deactivated in unarmed mode with throttle=low & roll=left & pitch=forward */
/* The value represents the hopping interval in cpu time (micro seconds) */
//#define LCD_TELEMETRY_AUTO 2000123
/* on telemetry page B it gives a bar graph which shows how much voltage battery has left. Range from 0 to 12 Volt is not very informative */
/* so we try do define a meaningful part. For a 3S battery we define full=12,6V and calculate how much it is above first warning level */
/* Example: 12.6V - VBATLEVEL1_3S (for me = 126 - 102 = 24) */
#define VBATREF 24
/* to log values like max loop time and others to come */
/* logging values are visible via LCD config */
//#define LOG_VALUES
//****** end of advanced users settings *************
//if you want to change to orientation of individual sensor
//#define ACC_ORIENTATION(X, Y, Z) {accADC[ROLL] = Y; accADC[PITCH] = -X; accADC[YAW] = Z;}
//#define GYRO_ORIENTATION(X, Y, Z) {gyroADC[ROLL] = -Y; gyroADC[PITCH] = X; gyroADC[YAW] = Z;}
//#define MAG_ORIENTATION(X, Y, Z) {magADC[ROLL] = X; magADC[PITCH] = Y; magADC[YAW] = Z;}
/**************************************/
/****END OF CONFIGURABLE PARAMETERS****/
/**************************************/
Julien- Messages : 18
Date d'inscription : 21/12/2011
Age : 42
![]()
![]()
Re: Projet Multiwiicopter QUAD X
![]() rik27 Ven 23 Déc - 14:57
rik27 Ven 23 Déc - 14:57

en vrac;
Étalonnage des gyroscopes
en configuration WMP uniquement:
Pour régler le neutre des gyroscopes,quad à l’arrêt, il faut mettre le manche de la dérive à fond à gauche + le manche du piqué à fond à bas + le manche du gaz en bas.
Le quad ne doit pas bouger durant cette étape, en revanche son inclinaison n’a pas d’influence (on peut même faire cette opération quad retourné)
en configuration WMP+NK:
Lorqu’un Nunchuk est relié au WMP, la phase de calibration doit être réalisée au moins une fois manuellement (même procédure que ci dessus). Par contre, lors de cette étape, il est impératif que le multirotor soit le plus horizontal possible. Si les accéléromètres indiquent des valeurs de +/- 400, c’est qu’ils n’ont pas été calibrés. Une fois calibrés, les valeurs des neutres sont enregistrées dans l’EEPROM, et il n’est pas nécessaire de le refaire à chaque vol.
1) Quelques fois, les gyroscopes semblent inefficaces ou donnent un graphique très perturbé dans l’interface graphique
Il existe beaucoup de copies en circulation de Wii Motion Plus sur Ebay (au moins 4 types différents). Elles fonctionnent plutôt bien, mais l’électronique utilisée pour gérée les gyroscopes Invensense varie.
On peut essayer de jouer sur plusieurs facteurs pour améliorer la situation:
* Ajouter des résistances de pull up sur le bus I2C. L’Atmel 328p en possède déjà en interne, mais elle ne sont pas toujours assez basses (longue distance, environnement perturbé)
* Diminuer la tension d’alimentation du Wii Motion Plus. Un Wii Motion Plus est normalement alimenté sous 3.3V. La tension de 5V est possible car il y a un régulateur interne, mais sous 3.3V il arrive que le WMP fonctionne mieux.
* Un Wii Motion Plus communique avec la WiiMote en I2C à une vitesse de 400KHz (fast mode). Il arrive (toujours vrai avec un WMP original) que cette vitesse ne soit pas adaptée avec un Arduino. Le sketch Arduino permet de dessendre cette vitesse à 100kHz (voir les premières lignes du code qui en font mention)
Heureusement, dans la majorité des cas, Il n’y a pas de problème concernant les copies utilisées.
2) Pourquoi est-ce important de définir une valeur minimum de commande pour chaque contrôleur moteur ?
Les moteurs doivent toujours tourner en vol quelque soit la situation:
* Les contrôleurs et les moteurs ne sont pas tous parfaits, et il arrive qu’ils ne se synchronisent pas correctement à chaque démarrage. On ne peut pas prendre ce risque en vol.
* Même en prenant ce risque, on constate un autre phénomène avec certains contrôleurs (notamment les Turgigy Plush): en dessous d’un certain seuil de commande, même si le moteur n’a pas le temps de s’arrêter, le temps de réaction lorqu’il repasse au dessus de ce seuil est très long et incompatible avec une stabilisation acceptable.
Si vous choisissez d’autres contrôleurs que les turnigy ou les super simple, c’est possible à condition d’adapter la valeur correspondante dans le code. Ce paramètre est très important, c’est pourquoi le sketch ne pourra pas être compilé si ce paramètre n’est pas changé.
3) Les moteurs ne peuvent pas être armés via la radio commande
Chaque canal RC doit être configuré pour avoir une pleine plage d’utilisation (pour un signal PPM, c’est une variation basse/haute entre 1000 et 2000 micro secondes). Ces valeurs peuvent être observées dans l’interface graphique en haut à droite.
Sur les radio Graupner/Futaba, celà revient à configurer sur chaque voie une ATV à 125%.
Si cet intervalle est trop petit, la valeur pour armer le MultiWii ne pourra pas être atteinte, et donnera l’impression d’un MultiWii qui ne répond pas à la radio.
4) Soyez bien sûrs que les contrôleurs moteur peuvent bien supporter un taux de raffraichisseemnt à 490Hz.
C’est le cas pour les Turnigy plush et les Super Simple. Mais tous ne le font pas.
Notez bien que le prix d’un contrôleur est indépendant de cette caractéristique.
5) Choisir d’autres couples de contrôleur/moteur/hélice
C’est tout à fait faisable, les exemples sur internet ne manquent pas.
6) L’Arduino semble bien être initialisé (LED clignotante), mais l’interface graphique n’arrive pas à communiquer avec.
Si vous utilisez Windows, le port COM doit parfois être configuré à 155200bit/s.
7) Rien ne se passe
Vous utilisez peut-être un clone d’un Arduino officiel qui n’a pas les mêmes caractéristiques.
En l’absence de toute connection (RC,ESCs, WMP), l’Arduino doit quand même clignote une fois initialisé.
rik27- Messages : 778
Date d'inscription : 02/05/2011
![]()
![]()
Re: Projet Multiwiicopter QUAD X
![]() rik27 Ven 23 Déc - 15:03
rik27 Ven 23 Déc - 15:03
valide deja cette ligne en effacent les deux // devant define . tes motors ce couperons quand les gaz seront a 0.
/* motors will not spin when the throttle command is in low position
this is an alternative method to stop immediately the motors */
//#define MOTOR_STOP
rik27- Messages : 778
Date d'inscription : 02/05/2011
![]()
![]()
Re: Projet Multiwiicopter QUAD X
![]() rik27 Ven 23 Déc - 15:05
rik27 Ven 23 Déc - 15:05
ta radio es allumé lors des essai ?
ton recepteur et bien blinder ?
ton recepteur et bien blinder ?
rik27- Messages : 778
Date d'inscription : 02/05/2011
![]()
![]()
Julien- Messages : 18
Date d'inscription : 21/12/2011
Age : 42
![]()
![]()
Re: Projet Multiwiicopter QUAD X
![]() rik27 Ven 23 Déc - 15:23
rik27 Ven 23 Déc - 15:23
ta config es correct a ce que je vois, et le recepteur qu es qui dit?
tu mis toute tes voies dans la radio a - 120 et +120 ?
rik27- Messages : 778
Date d'inscription : 02/05/2011
![]()
![]()
Re: Projet Multiwiicopter QUAD X
![]() Julien Ven 23 Déc - 15:25
Julien Ven 23 Déc - 15:25
Je dois m'absenter 3/4 d'heure, je te tiens au courant dès mon retour.
Julien- Messages : 18
Date d'inscription : 21/12/2011
Age : 42
![]()
![]()
Re: Projet Multiwiicopter QUAD X
![]() rik27 Ven 23 Déc - 15:27
rik27 Ven 23 Déc - 15:27
compare tes branchement avec la photo plus haut, recepteur ,arduino,moteurs.
mais surtout le recepteur, car y doit y avoir un truc,
mais surtout le recepteur, car y doit y avoir un truc,
rik27- Messages : 778
Date d'inscription : 02/05/2011
![]()
![]()
Re: Projet Multiwiicopter QUAD X
![]() rik27 Ven 23 Déc - 15:29
rik27 Ven 23 Déc - 15:29
ok
si il faut re injecte dans la carte de nouveau en passant par arduino.
si il faut re injecte dans la carte de nouveau en passant par arduino.
rik27- Messages : 778
Date d'inscription : 02/05/2011
![]()
![]()
Re: Projet Multiwiicopter QUAD X
![]() Julien Ven 23 Déc - 16:34
Julien Ven 23 Déc - 16:34
Je viens d'étalonner les ESC en suivant la procédure que tu m'a décrite, j'ai fait une vidéo afin que tu me confirme que je n'ai pas fait d'erreur.
Fallait il que j'augmente les courses des voies avant ? (à + et - 120)
Je te met la vidéo dès qu'elle a fini d'être uploader.
EDIT :
voici donc la vidéo :
calibration ESC par Maurice_chouchou
Fallait il que j'augmente les courses des voies avant ? (à + et - 120)
Je te met la vidéo dès qu'elle a fini d'être uploader.
EDIT :
voici donc la vidéo :
calibration ESC par Maurice_chouchou
Julien- Messages : 18
Date d'inscription : 21/12/2011
Age : 42
![]()
![]()
Re: Projet Multiwiicopter QUAD X
![]() Julien Ven 23 Déc - 17:10
Julien Ven 23 Déc - 17:10
Dans réglage des servo de la radio j'ai mis les 4 voies à 120 et j'ai vérifié tous les cablages recepteur -->carte Paris V4 : ils sont tous ok et conformes a l'ordre défini par le plan et son tableau (pour Quad X).
EDIT :
Je viens de faire un test et le résultat n'est pas celui que j'espérais
En voici la vidéo :
test non concluant ... par Maurice_chouchou
EDIT :
Je viens de faire un test et le résultat n'est pas celui que j'espérais
En voici la vidéo :
test non concluant ... par Maurice_chouchou
Julien- Messages : 18
Date d'inscription : 21/12/2011
Age : 42
![]()
![]()
rik27- Messages : 778
Date d'inscription : 02/05/2011
![]()
![]()
Re: Projet Multiwiicopter QUAD X
![]() rik27 Ven 23 Déc - 19:18
rik27 Ven 23 Déc - 19:18
donne moi ton numero en mp et je t appel sa ira plus vite
rik27- Messages : 778
Date d'inscription : 02/05/2011
![]()
![]()
Re: Projet Multiwiicopter QUAD X
![]() rik27 Ven 23 Déc - 19:23
rik27 Ven 23 Déc - 19:23
et a ce que je vois tu es en mode 1
donc pour armé c est le manche des gaz en bas et la dérive a droite pendant 2,5 sec
rik27- Messages : 778
Date d'inscription : 02/05/2011
![]()
![]()
Re: Projet Multiwiicopter QUAD X
![]() rik27 Ven 23 Déc - 19:33
rik27 Ven 23 Déc - 19:33
et pour calibré le controleur , les 3 autres doivent etre debranché, alim ect..
visiblement la voie des gaz est inversé, car le moteur tourne manche en bas.
de plus le controleur bip pas comme il devrai.
sur l autre video , tu peut pas armé car
. comme la voie des gaz est inversé ca ne peut pas marche, et la manoeuvre n es pas la bonne.
essai d inversé la voie 1 des gaz en somme
de refaire la calibration et apres de tous rebranché , d allumé la radio manche en bas branché la lipo et d armé la carte comme dit plus haut .
et dit moi vite ,
rik27- Messages : 778
Date d'inscription : 02/05/2011
![]()
![]()
Re: Projet Multiwiicopter QUAD X
![]() rik27 Ven 23 Déc - 20:43
rik27 Ven 23 Déc - 20:43
rik27- Messages : 778
Date d'inscription : 02/05/2011
![]()
![]()
rik27- Messages : 778
Date d'inscription : 02/05/2011
![]()
![]()
Re: Projet Multiwiicopter QUAD X
![]() rik27 Sam 24 Déc - 17:38
rik27 Sam 24 Déc - 17:38
Programmation de la radiocommande
La radiocommande doit être en mode avion ("ACRO").
Pour commencer, il faut paramètrer les signaux délivrés par le récepteur. Ces signaux habituellement destinés aux servos sont à largeur d'impulsion variable. La largeur d'impulsion varie entre 1000μs (mini.) et 2000μs (maxi.), le neutre étant représenté par 1500μs. Pour un fonctionnement correct avec le logiciel MultiWii, il faut que les signaux varient au minimum de 1100μs à 1900μs. Il est conseiller de dépasser un peu ces valeurs. (1095 / 1905μs). Pour ce faire, il faut agir sur les "courses" des différentes voies en les augmentant jusqu'à 125% par exemple.
On peut controler les min., max. et neutre sur la partie droite du logiciel GUI

Vérification du sens des capteurs
Gyromètres
- Roll : basculer à gauche = valeur négative.
- Pitch : basculer en arrière= valeur négative.
- Yaw : rotation vers la gauche = valeur négative.
Accéléromètres
- Idem pour Roll et Pitch
- Z: Gravité
Si le sens est différent, il faut modifier le code du logiciel.
Commandes
Plusieurs commandes sont réalisées avec les manches de la radio.
Armer les moteurs
1) Manche de gaz en bas
2) Maintenir le manche de lacet à droite 1s
La LED verte s'allume de façon permanente.
Désarmer les moteurs
1) Manche de gaz en bas
2) Maintenir le manche de lacet à gauche 1s
La LED verte s'éteint de façon permanente.
Calibrer les gyromètres
1) Placer le Multi-Copter parfaitement à plat
2) Moteurs désarmés
3) Manche de gaz en bas
4) Maintenir le manche de lacet à gauche et le manche de profondeur en bas 1s
La LED verte clignote rapidement puis s'éteint..
Calibrer les accéléromètres
1) Placer le Multi-Copter parfaitement à plat
2) Moteurs désarmés
3) Maintenir le manche de lacet à gauche, gaz à fond et le manche de profondeur en bas 1s
La LED verte clignote rapidement puis s'éteint..
"Trimer" les accéléromètres
1) Calibrer les Acc et Gyro.
2) En mode normal "Trimer" sur la radio.
3) Au sol, passer en mode "AutoLevel", observer la dérive de l'appareil (sur les 2 axes)
4) Moteurs désarmés
5) Manche moteur à fond
6) Utiliser le manche comme un interrupteur : pousser le manche et revenir au neutre pour faire 1 cran de trim dans le sens souhaité (inverse à la dérive)
Réglage P.I.D.
P comme proportionnel, I comme intégral, D comme Dérivé.
Un régulateur PID est un dispositif de régulation en boucle fermée. On entend par boucle fermée, le fait que l'on utilise une information issue du procédé que l'on veut réguler pour corriger l'erreur. Par exemple, pour une régulation en vitesse d'un moteur, on va entrer dans la régulation la vitesse mesurée du moteur.
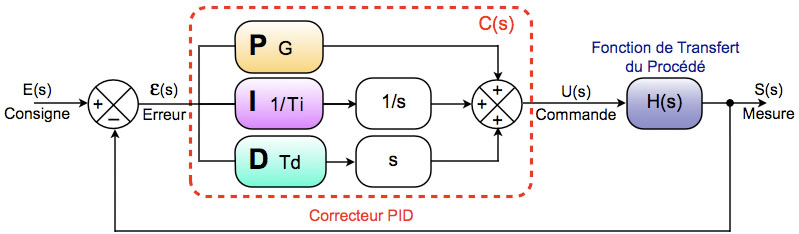
En faisant la différence entre la consigne et la mesure de la sortie du procédé, on en déduit l'Erreur. C'est sur cette valeur Erreur que l'on applique les coefficients P.I.D.
P : Action proportionnelle : Multiplication de l'erreur par un gain.
I : Action intégrale : Permet de tenir compte du passé de la régulation en effectuant au cours du temps l'intégrale de la variation de l'erreur. Son rôle est d'éliminer l'erreur résiduelle.
D : Action dérivée : Permet de tenir compte des variations brutales de l'erreur.
Voilà pour les généralités ...
Pour notre multicopter, le logiciel gère plusieurs boucles de régulation en utilisant les gyromètres seuls en mode "Acro" ou les gyromètres + les accéléromètres en mode "Stable" ...
La radiocommande doit être en mode avion ("ACRO").
Pour commencer, il faut paramètrer les signaux délivrés par le récepteur. Ces signaux habituellement destinés aux servos sont à largeur d'impulsion variable. La largeur d'impulsion varie entre 1000μs (mini.) et 2000μs (maxi.), le neutre étant représenté par 1500μs. Pour un fonctionnement correct avec le logiciel MultiWii, il faut que les signaux varient au minimum de 1100μs à 1900μs. Il est conseiller de dépasser un peu ces valeurs. (1095 / 1905μs). Pour ce faire, il faut agir sur les "courses" des différentes voies en les augmentant jusqu'à 125% par exemple.
On peut controler les min., max. et neutre sur la partie droite du logiciel GUI
Vérification du sens des capteurs
Gyromètres
- Roll : basculer à gauche = valeur négative.
- Pitch : basculer en arrière= valeur négative.
- Yaw : rotation vers la gauche = valeur négative.
Accéléromètres
- Idem pour Roll et Pitch
- Z: Gravité
Si le sens est différent, il faut modifier le code du logiciel.
Commandes
Plusieurs commandes sont réalisées avec les manches de la radio.
Armer les moteurs
1) Manche de gaz en bas
2) Maintenir le manche de lacet à droite 1s
La LED verte s'allume de façon permanente.
Désarmer les moteurs
1) Manche de gaz en bas
2) Maintenir le manche de lacet à gauche 1s
La LED verte s'éteint de façon permanente.
Calibrer les gyromètres
1) Placer le Multi-Copter parfaitement à plat
2) Moteurs désarmés
3) Manche de gaz en bas
4) Maintenir le manche de lacet à gauche et le manche de profondeur en bas 1s
La LED verte clignote rapidement puis s'éteint..
Calibrer les accéléromètres
1) Placer le Multi-Copter parfaitement à plat
2) Moteurs désarmés
3) Maintenir le manche de lacet à gauche, gaz à fond et le manche de profondeur en bas 1s
La LED verte clignote rapidement puis s'éteint..
"Trimer" les accéléromètres
1) Calibrer les Acc et Gyro.
2) En mode normal "Trimer" sur la radio.
3) Au sol, passer en mode "AutoLevel", observer la dérive de l'appareil (sur les 2 axes)
4) Moteurs désarmés
5) Manche moteur à fond
6) Utiliser le manche comme un interrupteur : pousser le manche et revenir au neutre pour faire 1 cran de trim dans le sens souhaité (inverse à la dérive)
Réglage P.I.D.
P comme proportionnel, I comme intégral, D comme Dérivé.
Un régulateur PID est un dispositif de régulation en boucle fermée. On entend par boucle fermée, le fait que l'on utilise une information issue du procédé que l'on veut réguler pour corriger l'erreur. Par exemple, pour une régulation en vitesse d'un moteur, on va entrer dans la régulation la vitesse mesurée du moteur.
En faisant la différence entre la consigne et la mesure de la sortie du procédé, on en déduit l'Erreur. C'est sur cette valeur Erreur que l'on applique les coefficients P.I.D.
P : Action proportionnelle : Multiplication de l'erreur par un gain.
I : Action intégrale : Permet de tenir compte du passé de la régulation en effectuant au cours du temps l'intégrale de la variation de l'erreur. Son rôle est d'éliminer l'erreur résiduelle.
D : Action dérivée : Permet de tenir compte des variations brutales de l'erreur.
Voilà pour les généralités ...
Pour notre multicopter, le logiciel gère plusieurs boucles de régulation en utilisant les gyromètres seuls en mode "Acro" ou les gyromètres + les accéléromètres en mode "Stable" ...
rik27- Messages : 778
Date d'inscription : 02/05/2011
![]()
![]()
Re: Projet Multiwiicopter QUAD X
![]() Julien Sam 24 Déc - 22:27
Julien Sam 24 Déc - 22:27
TRÈS GRAND MERCI A TOI ERIC !!!!
et TRÈS Joyeux Noël .
Amicalement,
Julien
et TRÈS Joyeux Noël .
Amicalement,
Julien
Julien- Messages : 18
Date d'inscription : 21/12/2011
Age : 42
![]()
![]()
Page 1 sur 2 • 1, 2 ![]()
![]()

 Sujets similaires
Sujets similaires» micro quad HUBSAN X4 !!!!!
» questions sur reglages de quad (carte kk v2)
» prises de vues aerienne en quadcopter
» BLADE MQX le mini quad de chez eflite
» Nouveau Micro-Quad chez Hobbyking
» questions sur reglages de quad (carte kk v2)
» prises de vues aerienne en quadcopter
» BLADE MQX le mini quad de chez eflite
» Nouveau Micro-Quad chez Hobbyking
Page 1 sur 2
Permission de ce forum:
Vous ne pouvez pas répondre aux sujets dans ce forum|
|
|